Inspection processes in offshore salmon farm cages currently lack technological sophistication, precision, and verifiability.
These processes are critical to reducing the environmental and social impact of the sector, which is subject to increasingly stringent regulations. The salmon farming industry in Chile comprises approximately 500 farm platforms in total.
The standard cost of ROV services for each platform is USD 74,400/year, giving a market potential of USD 37.2 million/year (TAM).
Only 13 companies own 50% of these platforms, with greater capacity to acquire technology, equivalent to a SAM of USD 18.6 million/year.
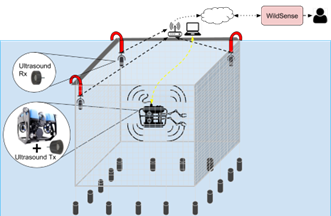
We have created an intelligent IoT system, incorporating robotics and computer vision to automate ROVs (underwater robots) for the inspection of farm nets and the monitoring of environmental variables within the cage. The platform provides access to relevant system information to improve the salmon industry’s decision-making capabilities and reduce its impact.
Currently, the R-SASA System implements the following operational solutions:
Ultrasonic ROV positioning system.
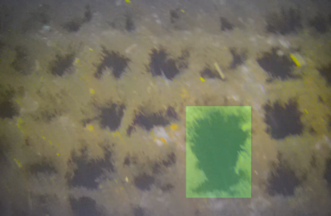
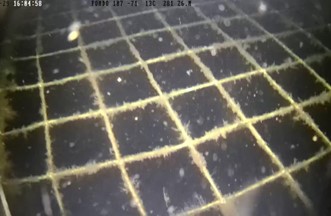
Fouling detector (algae contamination), with an accuracy greater than 80%, using machine vision.
Net break detector, with an accuracy of around 95%, using computer vision.
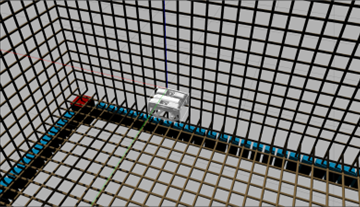
3D modeling and visualization of culture cages, incorporating visual information into the inspection process (coverage, breaks, and fouling).
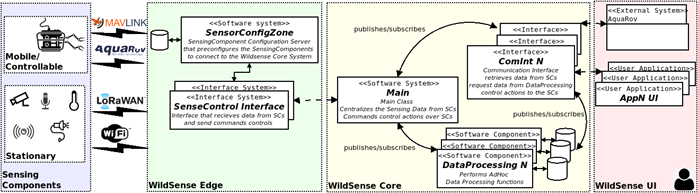
Modular software architecture for data acquisition, processing, analysis, and visualization.
Refinement and calibration of ROV positioning systems.
Refinement of machine vision algorithms for breakage and fouling detection.
Integration of devices to measure environmental variables into the ROV to characterize the cage’s internal environment.
IoT platform debugging for data integration, transmission, and storage, inspection visualization, and generation of dashboards and reports for analysis.
Detection of algae accumulation in crop nets
Biomass estimation with stereo depth analysis and computer vision.
Detection of Caligus wounds and SRS.